About me
Mind,
matter &
machine
I'm a PhD student in Applied Informatics and a full-time robotics programmer and trainer based in Bratislava, Slovakia. I hold a Master's degree in Robotics and Cybernetics from FEI STU Bratislava.
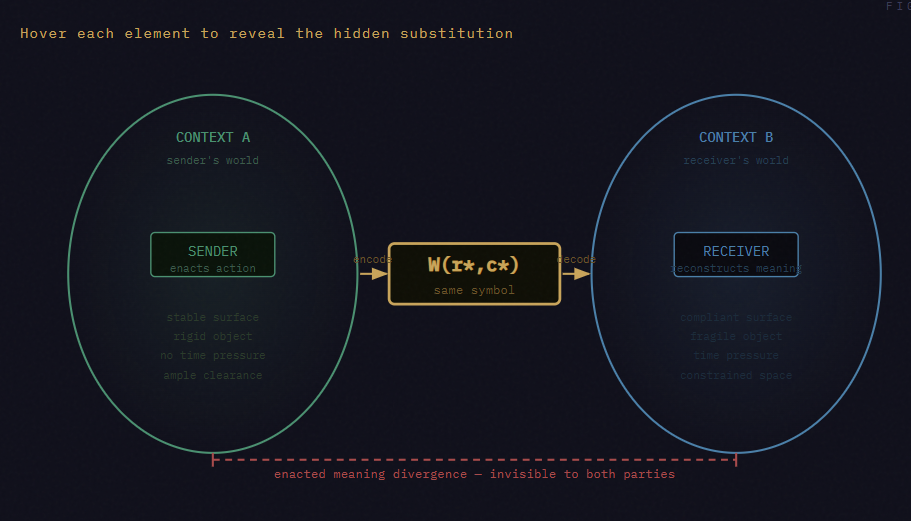
My theoretical research focuses on enhancing humanoid robots with cognitive abilities. Understanding the computational basis of action recognition is a central challenge in human--robot interaction. My research is inspired by the Mirror Neuron System.

Industrial Robotics
Simulation
Embodied Cognition
Motion Primitives
Enactive AI
Control Systems
Consciousness Research
Robotics Training